Bất cứ ai đã từng dùng thử máy lấy công bằng đều có thể xác nhận điều đó: Việc điều khiển bằng tay các cánh tay nắm lấy chỉ là một điều tầm thường. Việc thất bại khi cố gắng tóm lấy một chú thỏ nhồi bông là vô hại, những nỗ lực thất bại cũng có thể gây ấn tượng mạnh khi xử lý chất thải phóng xạ.

Hệ thống do robot hỗ trợ với Camera 3D Ensenso để xử lý an toàn chất thải hạt nhân
Hệ thống do robot hỗ trợ với Camera 3D Ensenso để xử lý an toàn chất thải hạt nhân
Việc ngừng hoạt động của các cơ sở hạt nhân đặt ra những thách thức lớn cho các nhà khai thác. Cho dù ngừng hoạt động hay ngăn chặn an toàn, lượng chất thải hạt nhân cần được xử lý đang tăng với tốc độ chóng mặt trên toàn thế giới. Tự động hóa ngày càng cần thiết để xử lý chất thải hạt nhân, nhưng ngành công nghiệp hạt nhân không muốn sử dụng các phương pháp điều khiển bằng robot hoàn toàn tự động vì lý do an toàn và các robot công nghiệp được điều khiển từ xa được ưa chuộng hơn trong các môi trường nguy hiểm. Tuy nhiên, các tác vụ phức tạp như kẹp hoặc cắt các vật thể không xác định được điều khiển từ xa với sự hỗ trợ của cần điều khiển và camera giám sát video rất khó kiểm soát và đôi khi thậm chí là bất khả thi.
Để đơn giản hóa quy trình này, Trung tâm Quốc gia về Robot Hạt nhân do Phòng thí nghiệm Robot Cực đoan tại Đại học Birmingham ở Anh đứng đầu đang nghiên cứu các phương án xử lý tự động đối với chất thải hạt nhân. Hệ thống hỗ trợ robot được phát triển ở đó cho phép điều khiển “được chia sẻ” để thực hiện các tác vụ thao tác phức tạp bằng phản hồi xúc giác và thông tin thị giác được cung cấp bởi máy ảnh Ensenso 3D. Người vận hành, người luôn có mặt trong vòng lặp có thể giữ quyền kiểm soát các hành động tự động của robot, trong trường hợp hệ thống bị lỗi.
Đơn xin
Bất cứ ai đã từng dùng thử máy lấy công bằng đều có thể xác nhận điều đó: Việc điều khiển bằng tay các cánh tay nắm lấy chỉ là một điều tầm thường. Việc thất bại khi cố gắng tóm lấy một chú thỏ nhồi bông là vô hại, những nỗ lực thất bại cũng có thể gây ấn tượng mạnh khi xử lý chất thải phóng xạ. Để tránh thiệt hại gây hậu quả nghiêm trọng cho con người và môi trường, robot phải có khả năng phát hiện các đối tượng phóng xạ trong hiện trường cực kỳ chính xác và hành động chính xác. Người vận hành có nó trong tay theo đúng nghĩa đen, việc xác định các vị trí kẹp chính xác là tùy thuộc vào anh ta. Đồng thời, anh ta phải đánh giá chính xác động học nghịch chuyển (chuyển đổi ngược) và xác định chính xác các góc khớp của các phần tử cánh tay của robot để đặt nó một cách chính xác và tránh va chạm. Hệ thống hỗ trợ do các nhà nghiên cứu người Anh phát triển giúp đơn giản hóa và tăng tốc công việc này một cách đáng kể: với một robot công nghiệp tiêu chuẩn được trang bị một bộ kẹp hàm song song và một máy ảnh Ensenso N35 3D.




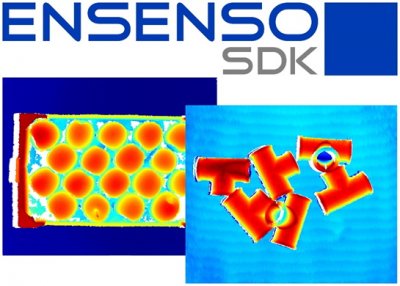
Hệ thống tự động quét các đối tượng rác thải không xác định và tạo ra mô hình 3D của chúng ở dạng đám mây điểm. Điều này cực kỳ chính xác vì máy ảnh Ensenso 3D hoạt động theo nguyên tắc tầm nhìn không gian (tầm nhìn âm thanh nổi), được mô phỏng theo thị giác của con người. Hai camera quan sát đối tượng từ các vị trí khác nhau. Mặc dù nội dung hình ảnh của cả hai hình ảnh máy ảnh có vẻ giống hệt nhau, nhưng chúng cho thấy sự khác biệt về vị trí của các đối tượng được xem. Vì đã biết khoảng cách và góc nhìn của camera cũng như tiêu cự của quang học, phần mềm Ensenso có thể xác định sự phối hợp 3D của điểm đối tượng cho từng pixel hình ảnh riêng lẻ. Trong trường hợp này, cảnh được chụp bằng cách sử dụng các vị trí quét khác nhau của máy ảnh và kết hợp để có được bề mặt 3D hoàn chỉnh từ mọi góc nhìn. Các quy trình hiệu chuẩn của Ensenso giúp chuyển đổi các đám mây điểm riêng lẻ thành một hệ tọa độ toàn cầu, giúp cải thiện hình ảnh ảo hoàn chỉnh. Do đó, đám mây điểm thu được chứa tất cả thông tin đối tượng không gian cần thiết để truyền đạt vị trí nắm hoặc cắt chính xác cho robot.

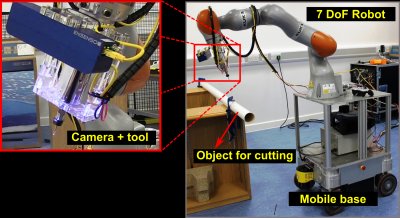
Hình Extreme Robotics Lab cắt bằng robot bán tự động có hướng dẫn thị giác 3D của vật thể kim loại trong môi trường phóng xạ.
Với sự trợ giúp của phần mềm, máy ảnh Enseno 3D sẽ tiếp nhận và đánh giá thông tin độ sâu cho người vận hành, do đó tải trọng nhận thức của họ giảm đáng kể. Hệ thống hỗ trợ kết hợp các tính năng xúc giác của đối tượng cần nắm với một thuật toán nắm đặc biệt.
“Đám mây cảnh được hệ thống của chúng tôi sử dụng để tự động tạo ra một số vị trí nắm bắt ổn định. Vì các đám mây điểm được camera 3D chụp lại có độ phân giải cao và dày đặc, nên có thể tạo ra các vị trí nắm bắt rất chính xác cho từng đối tượng trong cảnh. về điều này, “thuật toán xếp hạng giả thuyết” của chúng tôi sẽ xác định đối tượng tiếp theo để nhặt, dựa trên vị trí hiện tại của robot “, Tiến sĩ Naresh Marturi, Nhà khoa học nghiên cứu cấp cao tại Trung tâm Quốc gia về Robot hạt nhân giải thích.
(Nguyên tắc tương tự như trò chơi kỹ năng Mikado, trong đó mỗi lần phải lấy đi một cây gậy mà không di chuyển bất kỳ cây gậy nào khác).
Hướng dẫn đường đi xác định cho phép rô bốt điều hướng trơn tru và đồng đều dọc theo con đường mong muốn đến vị trí nắm bắt mục tiêu. Giống như hệ thống định vị, hệ thống này hỗ trợ người vận hành hướng dẫn cánh tay robot đến vị trí nắm bắt an toàn, nếu cần, cũng như vượt qua các vật thể nguy hiểm và không xác định khác. Hệ thống tính toán một hành lang an toàn cho việc này và giúp người vận hành không rời khỏi hành lang thông qua phản hồi xúc giác.
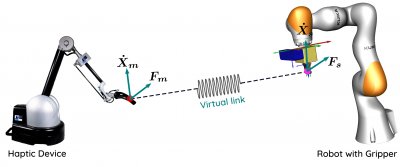
Hệ thống ánh xạ các chuyển động tay tự nhiên của người điều khiển một cách chính xác và đáng tin cậy trong thời gian thực với các chuyển động tương ứng của rô bốt. Do đó, người vận hành luôn duy trì quyền điều khiển thủ công và có thể tiếp quản trong trường hợp thành phần bị lỗi. Anh ta có thể chỉ cần tắt AI và quay trở lại trí thông minh của con người bằng cách tắt “chế độ phản hồi lực”. Theo nguyên tắc kiểm soát chung giữa con người và máy móc, do đó, hệ thống luôn trong tầm kiểm soát – điều cần thiết trong môi trường có mức độ nguy hiểm cao nhất.
Máy ảnh
Tiến sĩ Naresh Marturi cho biết: “Đối với tất cả các nhiệm vụ lập kế hoạch nắm bắt tự động, điều khiển từ xa và theo dõi đối tượng trực quan của chúng tôi, chúng tôi sử dụng máy ảnh 3D mẫu Ensenso N35 với đèn LED màu xanh lam (465nm) được gắn trên bộ hiệu ứng cuối của rô bốt cùng với các công cụ khác,” Tiến sĩ Naresh Marturi nói. Cho đến nay, hầu hết các hệ thống từ Phòng thí nghiệm Robot cực đoan đều được trang bị một camera 3D duy nhất. “Tuy nhiên, gần đây để đẩy nhanh quá trình xây dựng mô hình 3D, chúng tôi đã nâng cấp hệ thống của mình để sử dụng thêm ba máy ảnh 3D Ensenso gắn cảnh cùng với một máy ảnh trên tàu.”
Ensenso N series là tiền đề cho nhiệm vụ này. Nó được thiết kế đặc biệt để sử dụng trong các điều kiện môi trường khắc nghiệt. Nhờ thiết kế nhỏ gọn, dòng N series phù hợp như nhau cho việc sử dụng cố định hoặc di động tiết kiệm không gian trên cánh tay robot để phát hiện 3D các vật thể chuyển động và tĩnh. Ngay cả trong điều kiện ánh sáng khó khăn, máy chiếu tích hợp chiếu kết cấu có độ tương phản cao lên vật thể cần chụp ảnh bằng mặt nạ hoa văn với mẫu chấm ngẫu nhiên, do đó bổ sung các cấu trúc không hoặc chỉ hiện diện yếu trên bề mặt của vật thể đó. Vỏ nhôm của các mẫu N30 đảm bảo tản nhiệt tối ưu cho các linh kiện điện tử và do đó phát ra ánh sáng ổn định ngay cả trong điều kiện môi trường khắc nghiệt. Điều này đảm bảo chất lượng cao và ổn định của dữ liệu 3D. Ngay cả trong điều kiện ánh sáng khó khăn, máy chiếu tích hợp chiếu kết cấu có độ tương phản cao lên vật thể cần chụp ảnh bằng mặt nạ hoa văn với mẫu chấm ngẫu nhiên, do đó bổ sung các cấu trúc không hoặc chỉ hiện diện yếu trên bề mặt của vật thể đó.
Các máy ảnh thuộc dòng máy ảnh Ensenso N dễ dàng thiết lập và vận hành thông qua SDK Ensenso. Nó cung cấp khả năng xử lý hình ảnh dựa trên GPU để xử lý dữ liệu 3D nhanh hơn nữa và cho phép xuất ra một đám mây điểm 3D duy nhất của tất cả các máy ảnh được sử dụng trong hoạt động nhiều máy ảnh, được yêu cầu trong trường hợp này, cũng như thành phần trực tiếp của điểm 3D mây từ nhiều hướng xem. Đối với hệ thống hỗ trợ, các nhà nghiên cứu đã phát triển phần mềm của riêng họ bằng C ++ để xử lý các đám mây điểm 3D được máy ảnh chụp lại.
Tiến sĩ Naresh Marturi giải thích: “Phần mềm của chúng tôi sử dụng SDK Ensenso (đa luồng) và các quy trình hiệu chuẩn của nó để phủ kết cấu lên các đám mây điểm có độ phân giải cao và sau đó biến đổi các đám mây điểm có kết cấu này thành một hệ tọa độ thế giới. “Ensenso SDK khá dễ tích hợp với phần mềm C ++ của chúng tôi. Nó cung cấp nhiều chức năng và phương pháp đơn giản để chụp và xử lý các đám mây điểm cũng như hình ảnh camera. Hơn nữa, với sự hỗ trợ CUDA, các quy trình SDK cho phép chúng tôi đăng ký nhiều đám mây điểm có độ phân giải cao để tạo ra các đám mây cảnh chất lượng cao trong khung hình toàn cầu. Điều này rất quan trọng đối với chúng tôi, đặc biệt là để tạo ra giả thuyết nắm bắt chính xác. “

Hình: Tiến sĩ Naresh Marturi, Nhà khoa học nghiên cứu cao cấp về Robot (trái), Maxime Adjigble, Kỹ sư nghiên cứu Robot (phải)
Ưu điểm chính của hệ thống
-Người vận hành không cần phải lo lắng về độ sâu cảnh hoặc làm thế nào để tiếp cận đối tượng hoặc nơi để nắm bắt nó. Hệ thống có thể tìm ra mọi thứ trong nền và giúp người điều khiển di chuyển chính xác đến nơi mà robot có thể nắm bắt đối tượng tốt nhất.
-Với phản hồi xúc giác, người vận hành có thể cảm nhận được robot trong tay của họ ngay cả khi robot không có mặt trước mặt họ.
-Bằng cách kết hợp haptics và lập kế hoạch nắm bắt, người vận hành có thể di chuyển các đối tượng trong một cảnh từ xa rất dễ dàng và rất nhanh chóng với tải nhận thức rất thấp.
Điều này giúp tiết kiệm thời gian và tiền bạc, tránh sai sót và tăng độ an toàn.
Quan điểm
Các nhà nghiên cứu tại Phòng thí nghiệm rô bốt cực đoan ở Birmingham hiện đang phát triển một phương pháp mở rộng cho phép sử dụng bàn tay nhiều ngón thay vì kẹp hàm song song. Điều này sẽ tăng tính linh hoạt và độ tin cậy khi nắm bắt các đối tượng phức tạp. Trong tương lai, người điều khiển cũng có thể cảm nhận được lực mà các ngón tay của robot điều khiển từ xa tiếp xúc khi nắm chặt một vật thể. Các phương pháp nắm hoàn toàn tự động cũng đang được phát triển, trong đó cánh tay robot được điều khiển bởi AI và được hướng dẫn bởi hệ thống thị giác tự động. Nhóm cũng đang nghiên cứu các công cụ trực quan hóa để cải thiện sự hợp tác giữa con người và robot để điều khiển robot từ xa thông qua hệ thống “điều khiển chia sẻ”.
Đây là một cách tiếp cận đầy hứa hẹn cho sự an toàn và sức khỏe của tất cả chúng ta: việc xử lý các vật thể nguy hiểm như chất thải hạt nhân cuối cùng là vấn đề mà tất cả chúng ta quan tâm. Bằng cách ghi lại thông tin đối tượng có liên quan một cách đáng tin cậy, máy ảnh Ensenso 3D đang đóng góp quan trọng vào nhiệm vụ ngày càng cấp bách phổ biến trên toàn cầu này.
Khách hàng / Trường đại học
Phòng thí nghiệm Extreme Robotics, Đại học Birmingham, Vương quốc Anh đang dẫn đầu thị trường về nhiều thành phần cần thiết cho những nỗ lực ngày càng tăng nhằm cải tiến các hoạt động hạt nhân của robot.
https://www.birmingham.ac.uk/research/activity/met luyện kim-materials/robotics/our-technologies.aspx
Giới thiệu về Hệ thống phát triển hình ảnh IDS GmbH:
Nhà sản xuất máy ảnh công nghiệp IDS Imaging Development Systems GmbH phát triển các máy ảnh USB, GigE và 3D hiệu suất cao, dễ sử dụng với nhiều loại cảm biến và biến thể. Phạm vi ứng dụng gần như không giới hạn bao gồm nhiều lĩnh vực phi công nghiệp và công nghiệp trong lĩnh vực thiết bị, nhà máy và cơ khí. Ngoài các máy ảnh CMOS thành công, công ty còn mở rộng danh mục đầu tư của mình với các máy ảnh thông minh dựa trên ứng dụng tầm nhìn. Nền tảng xử lý hình ảnh mới IDS NXT có thể lập trình miễn phí và cực kỳ linh hoạt.
Nội dung & ý kiến trong bài viết này là của tác giả và không nhất thiết thể hiện quan điểm của RoboticsTomorrow
Nguồn : www.roboticstomorrow.com. (Post by Automation Bot)