





Thế giới đang nhanh chóng thay đổi đối với các nhà kho hiện đại. Các công ty thương mại điện tử, nhà bán lẻ, bệnh viện và các doanh nghiệp hậu cần bên thứ ba khác xem robot di động tự trị (AMRs) là một công nghệ quan trọng để kiềm chế chi phí lao động cao và tăng thông lượng để giảm thời gian thực hiện.
Chủ sở hữu nhà máy và người quản lý muốn AMRs nhanh chóng dễ triển khai với khả năng sửa đổi khi đang di chuyển. Không giống như người tiền nhiệm của nó, phương tiện dẫn đường tự động (AGV), AMR có thể hiểu các lệnh và tự động phát hiện và tránh các chướng ngại vật để điều hướng qua các môi trường làm việc khác nhau mà không cần đi trên đường dẫn trực tiếp hoặc có người vận hành kiểm soát chuyển động của nó. Bài viết này mô tả việc phát triển và triển khai AMRs với công nghệ phần cứng và phần mềm tích hợp, và bao gồm các trường hợp sử dụng cho các nhà máy, thành phố thông minh và bệnh viện.
Nhu cầu kho tinh vi thúc đẩy xu hướng lớn từ AGV đến AMR
Thị trường AMR đang bùng nổ. Năm 2020, quy mô thị trường là 356 triệu USD. MarketWatch dự đoán rằng nó sẽ tăng trưởng với tốc độ tăng trưởng kép hàng năm (CAGR) từ 15,9% đến 1011 triệu đô la vào năm 2026. Nhu cầu của các doanh nghiệp sản xuất và logistics, triển khai robot nhanh chóng và dễ dàng, và dây chuyền sản xuất linh hoạt. Xu hướng này, đi kèm với sự xuất hiện của các ứng dụng mới, đang thúc đẩy một phong trào lớn từ xe dẫn đường tự động (AGV) sang AMRs. Để hiểu xu hướng lớn từ AGV đến AMRs, chúng ta hãy xem xét hai công nghệ.
Xe dẫn đường tự động (AGV) so với Robot di động tự động (AMR) – Sự khác biệt chính
Cho đến gần đây, AGV đại diện cho công nghệ tiên tiến mới nhất – có khả năng vận chuyển nguyên liệu thô, công trình chế biến và thành phẩm đến dây chuyền sản xuất hoặc lưu trữ và thu hồi hàng hóa trong kho và trung tâm hậu cần. AGV sử dụng kết hợp phần mềm và hệ thống hướng dẫn dựa trên cảm biến để điều hướng chuyển động của chúng. Chúng an toàn và đáng tin cậy trong việc di chuyển tải vì chúng đi theo một con đường cố định với khả năng tăng tốc và giảm tốc và phát hiện chướng ngại vật được kiểm soát chính xác.
Tuy nhiên, AGV thiếu tính linh hoạt, (xem hình 1). Ví dụ, nếu bố cục dây chuyền sản xuất thay đổi, điều này có nghĩa là cơ sở hạ tầng theo dõi hướng dẫn sẽ cần định tuyến lại, thường liên quan đến thời gian và tiền bạc. Khi AGV phát hiện chướng ngại vật, nó dừng lại cho đến khi ai đó tự loại bỏ mục. Hơn nữa, AGV không thể tương tác với con người vì hệ thống quản lý hạm đội được tập trung mà không có giao tiếp ngang hàng.
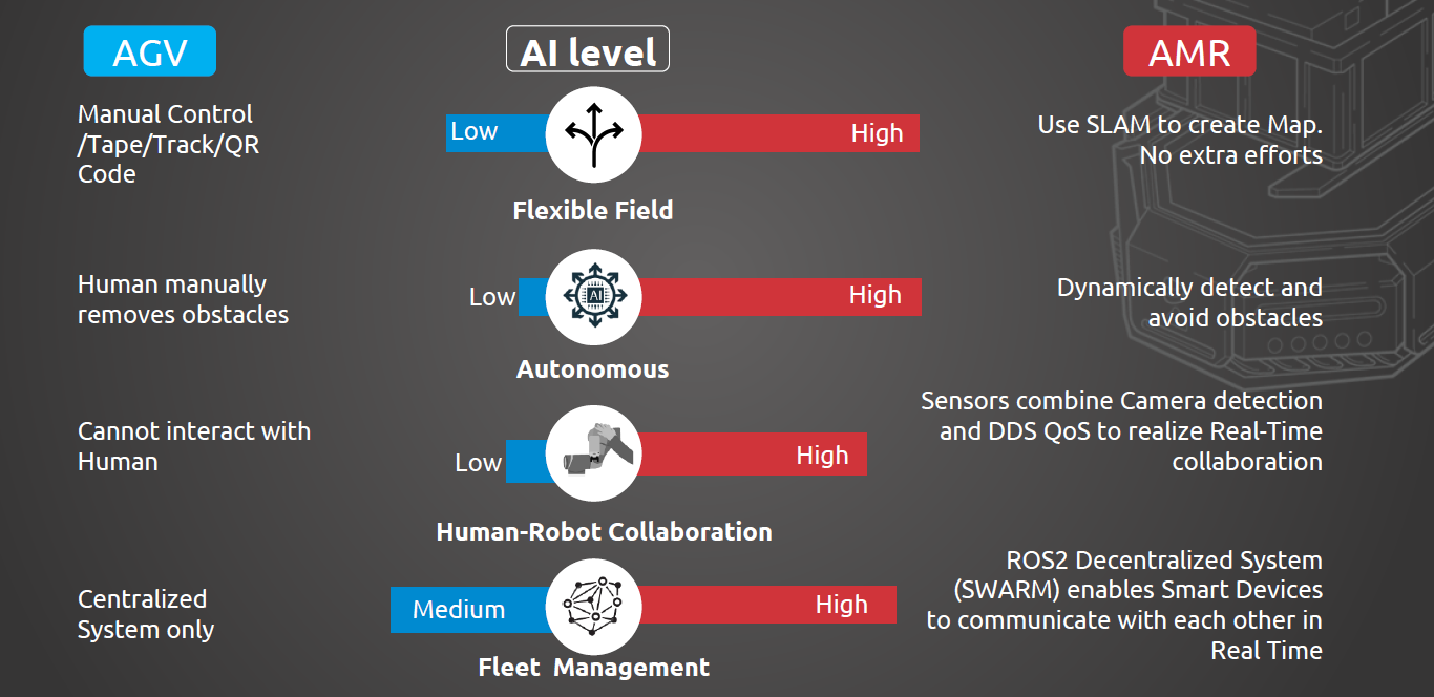



Hình 1. So sánh giữa AVGs và AMRs
AMRs linh hoạt hơn nhiều. Nếu bố cục hoạt động thay đổi, bản địa hóa và lập bản đồ đồng thời (SLAM) cho phép robot khám phá không gian không xác định để tạo bản đồ tự động mà không cần thêm nỗ lực hoặc chi phí cho người vận hành. AMRs có thể sử dụng một loạt các công nghệ cảm biến để phát hiện và tránh chướng ngại vật một cách linh hoạt, bao gồm cả con người. Những robot này sử dụng cảm biến và kết hợp giữa phát hiện máy ảnh và công nghệ truyền thông thời gian thực, cho phép hợp tác theo thời gian thực với con người.
Một hướng đi mới: việc di chuyển từ ROS 1 sang ROS 2 cho phép tự chủ robot dạng nhóm
Hệ điều hành robot (ROS) là một khung nguồn mở cho phát triển phần mềm robot không phải là robot hay hệ điều hành. ROS được tạo ra vào năm 2007 bởi Eric Berger và Keenan Wyrobek, hai nghiên cứu sinh tiến sĩ stanford, những người muốn các nhà phát triển phần mềm có kiến thức phần cứng robot tối thiểu để viết phần mềm cho robot.
Ngày nay, ROS Classic, hiện được gọi là ROS 1, có các gói, công cụ và hướng dẫn ổn định phong phú bao bọc phần cứng để phát triển các ứng dụng robot khác nhau. Các khối xây dựng ROS bao gồm phản ứng tổng hợp cảm biến, điều hướng, trực quan hóa và lập kế hoạch chuyển động.
Ban đầu được phát triển để sử dụng trong học tập, ROS 1 giả định giao tiếp hoàn hảo. Trong thế giới thực, giao tiếp ít hoàn hảo hơn, đặc biệt là trong môi trường công nghiệp. Các yếu tố thay đổi, chẳng hạn như băng thông, khả năng kết nối mạng và phạm vi liên lạc, cũng như mức tiêu thụ điện năng thu phát cho robot di động chạy bằng pin thêm biến chứng. Hơn nữa, ROS 1 chỉ được dự định sử dụng với một robot duy nhất. Để làm cho các nhà máy thông minh hơn khi có nhiều robot, họ cần sự hợp tác. Dựa trên khung truyền thông DDS, ROS 2 phân cấp hệ thống quản lý đội tàu bằng cách cho phép AMRs giao tiếp trong thời gian thực theo cách ngang hàng, được gọi là tự chủ dạng nhóm .
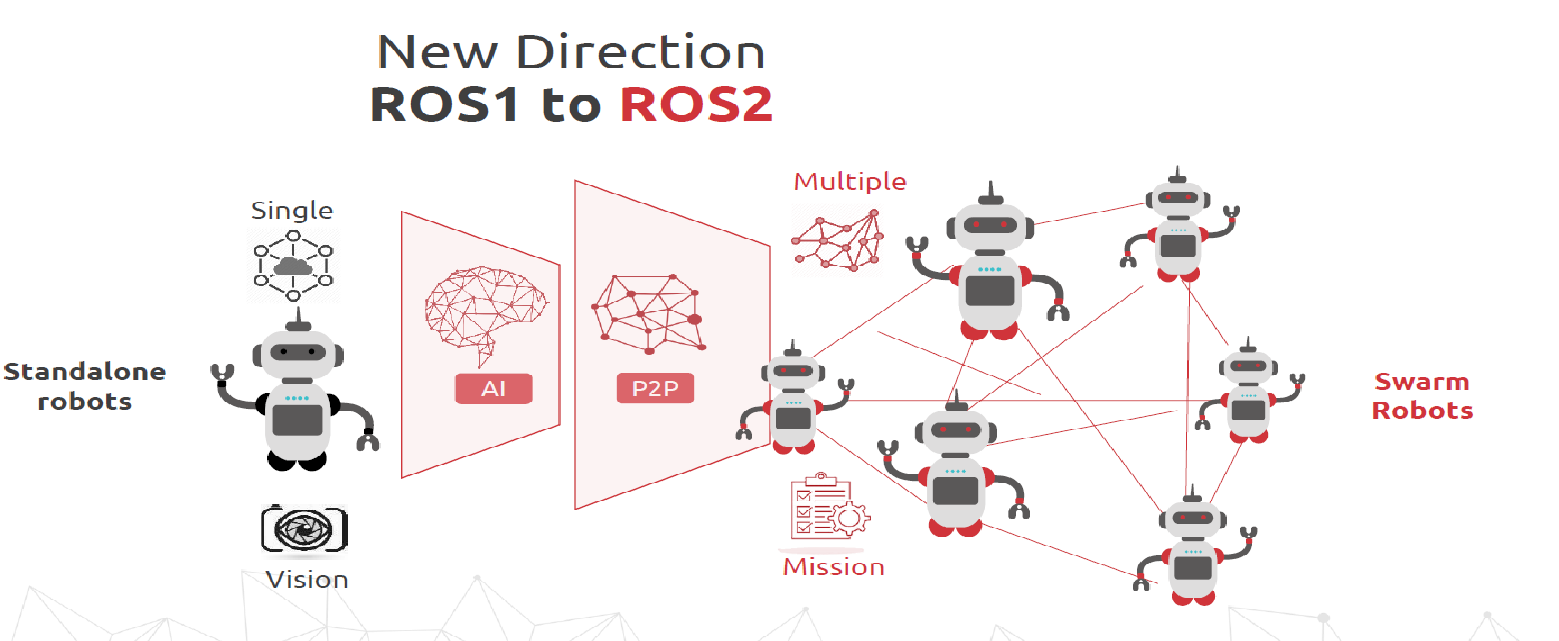
Hình 2. Một hướng đi mới – sự di chuyển từ ROS 1 sang ROS 2 cho phép tự chủ robot dạng nhóm
Sự chuyển đổi từ AGV sang AMR và quá trình chuyển đổi từ ROS 1 sang ROS 2 có thể một phần được gây ra hoặc thúc đẩy bởi các ưu tiên của nhà máy. Trong các nhà máy thông minh hiện đại và các trung tâm kho và hậu cần, các nhà quản lý nhà máy muốn thông lượng cao hơn. Họ muốn AMRs hiệu quả và có khả năng thực hiện các nhiệm vụ bổ sung. Chủ sở hữu cũng muốn triển khai nhanh chóng và dễ dàng, có nghĩa là họ cần amr để hoạt động nâng cấp nhanh chóng mà không cần phải cài đặt sẵn cơ sở hạ tầng. Họ cũng cần sự linh hoạt để sửa đổi dây chuyền sản xuất, điều chỉnh cài đặt trong thời gian thực và thực hiện các tác vụ này một cách dễ dàng. Vì những lý do này, trong khi nhiều nhà phát triển sử dụng ROS 1 để tạo mẫu AMR, có một xu hướng chuyển sang ROS 2.
Thách thức khi xây dựng thế hệ tiếp theo, ROS 2 AMRs
Tương lai của AMRs là tự chủ dạng nhóm . Một bầy robot di động tự trị có thể thực hiện công việc của họ mà không có sự giám sát của người vận hành. Để đạt được điều này, ngành công nghiệp phải chuyển từ ROS 1 sang ROS 2.
Tuy nhiên, việc chuyển sang ROS 2 là một thách thức, đặc biệt là khi phát triển và triển khai một bầy AMRs. Đối với các nhà phát triển đã sử dụng ROS 1, có ba thách thức chính: độ phức tạp, khả năng mở rộng và khả năng nâng cấp.
Thiết kế cho AMRs rất phức tạp. Để xây dựng một hệ thống robot, bạn cần chọn và mua phần cứng từ nền tảng máy tính đến cảm biến, bộ điều khiển chuyển động, thiết kế cơ khí và cài đặt phần mềm (hệ điều hành (HỆ ĐIỀU HÀNH), trình điều khiển và gói). Nếu bạn không quen thuộc với một hệ thống, có thể mất đến một tháng để hoàn thành tích hợp hệ thống. Nếu bạn cần các khả năng tiên tiến như khả năng thời gian thực hoặc chất lượng dịch vụ chuyên dụng (QoS), nhà phát triển phải tự phát triển mã hóa. Một khi robot được chế tạo để chứng minh khái niệm, khả năng mở rộng và triển khai trở thành mối quan tâm lớn hơn.
ROS 1 không được xây dựng với mục đích được sử dụng để giao tiếp trên nhiều AMRs; làm như vậy làm tăng nguy cơ các vấn đề chính xác, thất bại hoặc thiệt hại cho hệ thống hạm đội. Các nhà khai thác cần có khả năng dựa vào việc triển khai AMR quy mô lớn mà không phải trả chi phí cắt cổ để thực hiện.
Hỗ trợ cho ROS 1 dự kiến sẽ kết thúc cuộc sống (EOL) vào năm 2025, có nghĩa là nhiều công ty sẽ cần phải xác định cách di chuyển từ ROS 1 sang ROS 2. Để làm như vậy, các nhà phát triển cần làm quen với quá trình di chuyển.
Những lưu ý khi triển khai AMRs với ROS 2
ROS 2 là bản cập nhật đưa ROS 1 ra khỏi học viện và vào lĩnh vực công nghiệp. ROS 2 cho phép sử dụng công nghiệp thông qua hợp tác đa robot và giao tiếp thời gian thực đáng tin cậy, chịu lỗi. ROS 2, sử dụng DDS làm xương sống, cung cấp một môi trường trao đổi dữ liệu thống nhất, giống như một dòng dữ liệu, vì vậy một bầy AMRs có thể giao tiếp với nhau. Các thiết bị bổ sung áp dụng công nghệ Dịch vụ dữ liệu phân tán (DDS) cũng có thể sử dụng dòng dữ liệu để chia sẻ dữ liệu chung.
DDS là một thành phần quan trọng của ROS 2. Cốt lõi của công nghệ của nó là tiêu chuẩn Xuất bản-Đăng ký Trung tâm dữ liệu (DCPS), cung cấp Không gian dữ liệu toàn cầu mà tất cả các ứng dụng độc lập có thể truy cập. Hải quân Hoa Kỳ đã sử dụng ROS 2 để giải quyết các vấn đề tương thích với việc nâng cấp phần mềm quy mô lớn trong môi trường mạng phức tạp của tàu. Kể từ khi được phát hành bởi Object Management Group (OMG) vào năm 2004, DDS được áp dụng rộng rãi như là giải pháp tiêu chuẩn để xuất bản dữ liệu và đăng ký giao tiếp thời gian thực phân tán trong các hệ thống tự trị và đòi hỏi khắt khe.
Có một số cân nhắc khi tìm kiếm giải pháp AMR dựa trên ROS 2 phù hợp.
- Đầu tiên, bạn phải xác định xem các hệ thống có được tối ưu hóa để điều hướng AMR hay không – bao gồm tích hợp phần cứng và phần mềm – để tránh phụ thuộc tốn thời gian, các vấn đề phiên bản và biên dịch lỗi.
- Để đạt được độ chính xác cao với phản ứng tổng hợp cảm biến, đồng bộ hóa thời gian từ nhiều cảm biến tích hợp ví dụ như hình ảnh GMSL (Gigabit Multimedia Serial Link), IMU (Đơn vị đo lường quán tính) là rất quan trọng.
- Để tối ưu hóa việc xử lý dữ liệu nội bộ, hãy xem xét liệu hệ thống có cơ chế bộ nhớ được chia sẻ hay không ( xem hình 3). Trong các triển khai truyền thống, các quy trình trong hệ thống cần truyền tin nhắn qua lớp mạng hệ điều hành, phát sinh độ trễ. Truy cập bộ nhớ được chia sẻ và thực hiện truyền trực tiếp là một cách tiếp cận được tối ưu hóa và giảm độ trễ đáng kể.
- Tìm một giải pháp có thể cung cấp thông tin liên lạc phi tập trung, sẽ hỗ trợ tự chủ dạng nhóm trong khi vẫn đảm bảo khả năng chịu lỗi và dự phòng.
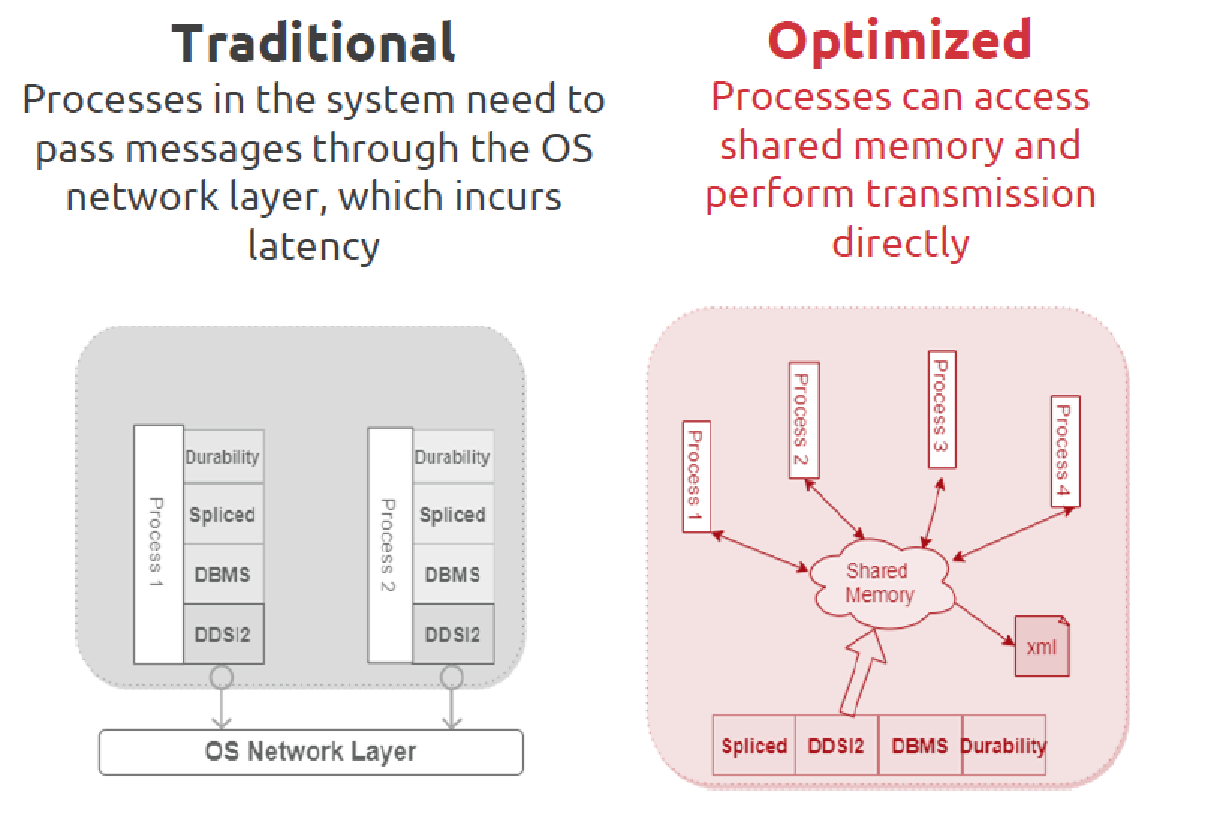
Hình 3. Tối ưu hóa giao tiếp liên quy trình bằng cách sử dụng cơ chế bộ nhớ dùng chung
Cuối cùng, hãy xem xét nếu giải pháp dễ thực hiện. Một số nhà cung cấp cung cấp bộ dụng cụ phát triển phần mềm (SDK) với hiệu suất DDS được tối ưu hóa để hỗ trợ kiến trúc dạng nhóm và đảm bảo giao tiếp đáng tin cậy. Eclipse Cyclone DDS là một triển khai DDS nhanh chóng và đáng tin cậy được Ủy ban chỉ đạo kỹ thuật ROS 2 (TSC) chọn làm phần mềm trung gian ROS (RMW) mặc định cho bản phát hành ROS 2 Galactic Geochelone. Cấu hình mặc định này hoạt động cho hầu hết các nhà phát triển; tuy nhiên, họ cũng có thể sử dụng cấu hình RMW không mặc định.
Để triển khai dễ dàng hơn và triển khai nhanh hơn, hãy tìm kiếm các nhà cung cấp cung cấp môi trường phát triển tích hợp (IDE), ứng dụng có gói được kiểm tra và xác minh và mã mẫu cho thiết kế tham chiếu. Để giúp nhà phát triển di chuyển từ ROS 1 sang ROS 2 một cách dễ dàng, một số nhà cung cấp cung cấp hướng dẫn di chuyển bao gồm các cách tiếp cận khác nhau và mô tả các lợi ích và vấn đề liên quan đến quá trình di chuyển.
ADLINK và Foxconn thành lập FARobot® tự chủ dạng nhóm
ADLINK hiện đang làm việc với gã khổng lồ sản xuất toàn cầu, Tập đoàn Công nghệ Hon Hai (Foxconn). Foxconn đã sử dụng AGV trong các cơ sở sản xuất của họ nhưng họ muốn cải thiện tính linh hoạt của dây chuyền sản xuất. Foxconn đã thành lập một liên doanh với ADLINK, được gọi là FARobot®, để phát triển hệ thống robot dạng nhóm tiên tiến (SRS) và các giải pháp robot di động tự trị (AMR) sử dụng ROS 2, (xem hình 4).

Hình 4. Robot FARobot AMR có thể tăng hiệu quả và năng suất công nghiệp
Khi AMRs giao tiếp với nhau trong thời gian thực, họ có thể thực hiện lập kế hoạch và phân công nhiệm vụ và sử dụng giao tiếp ngang hàng để xác định đường dẫn vị trí cho mỗi ARM. Nếu có lỗi ở một trong các AMRs, hạm đội sẽ bắt đầu sao lưu ngay lập tức và tự động gửi robot phù hợp nhất để hỗ trợ.
Giải pháp AMR độc đáo của FARobot có tính năng cộng tác dạng nhóm , thất bại nhiệm vụ và tối ưu hóa hiệu suất. Bằng cách áp dụng công nghệ tự chủ dạng nhóm mới nhất, robot FARobot AMR có thể tăng hiệu quả và năng suất công nghiệp – ví dụ, cung cấp nguyên liệu hoặc linh kiện phù hợp đến đúng nơi vào đúng thời điểm để giảm các khoản giữ không cần thiết.
Nhà máy của tương lai: 5G tư nhân với DDS để tích hợp thời gian thực
Fair Friend Group (FFG), một trong những nhà sản xuất máy công cụ lớn nhất trên toàn cầu, nhận ra rằng tình trạng thiếu lao động và thay đổi nhu cầu đòi hỏi nhu cầu cấp thiết về nâng cấp hậu cần, cải tiến kiểm tra và tăng cường các dịch vụ kỹ thuật. Trong khi công ty sử dụng AGV, họ muốn cải thiện tính linh hoạt để có hiệu quả cao hơn và giảm chi phí. FFG đã hợp tác với ADLINK và Viện Công nghiệp Thông tin (III) để lên kế hoạch xây dựng các nhà máy thông minh.
Khi triển khai các giải pháp nhà máy thông minh, bạn phải tính đến tính linh hoạt trong sản xuất, mở rộng nhà máy và chuyển mạch đường dây nhanh. Trong những môi trường đó, giao tiếp là chìa khóa; DDS có thể hoạt động như phần mềm trung gian cho cả môi trường sản xuất có dây và không dây và những người có nhiều công nghệ không dây. Với độ tin cậy cao, DDS kết hợp với độ trễ thấp 5G riêng và truyền tải tốc độ cao giúp tăng cường độ nhạy và tốc độ phản hồi của AGV
Việc thực hiện tự chủ dạng nhóm đầu tiên là trên các dây chuyền sản xuất súng phun cấp công nghiệp tại nhà máy của thành viên FFG Anest Iwata, nằm ở thị trấn Hukou, quận Hsinchu, Đài Loan. Trung tâm giám sát thiết bị sản xuất và hoạt động kết hợp 5G tư nhân với DDS để tích hợp thời gian thực với thông tin dây chuyền sản xuất và kết nối với AMRs để vận chuyển các bộ phận và linh kiện đến nhiều bộ phận kiểm tra để nâng cao năng suất, (xem hình 5).
Biểu đồ 5: Tích hợp thời gian thực với thông tin dây chuyền sản xuất và kết nối với AMRs để vận chuyển.
Việc triển khai bao gồm ba ứng dụng công nghệ quan trọng: giải pháp AMR, kiểm tra quang học tự động (AOI) và kính thông minh thực tế tăng cường (AR). Sự kết hợp này làm tăng tỷ lệ năng suất của nhà máy lên 15% và giảm 20% chi phí sản xuất.
Tương lai của AMRs
Khi nhu cầu tự chủ dạng nhóm với giao tiếp ngang hàng tăng lên, các ngành công nghiệp sẽ tiếp tục xu hướng chuyển từ AGV sang AMRs và từ ROS 1 sang ROS 2. ROS 2 là một bước đột phá hỗ trợ phát triển và triển khai AMR, bao gồm một loạt các ứng dụng ngoài các thiết lập công nghiệp.
Đại dịch gần đây đã đưa AMRs vào lĩnh vực chăm sóc sức khỏe để tự động hóa việc khử trùng các phường và đơn vị chăm sóc đặc biệt. AMRs cũng có thể cung cấp hỗ trợ bệnh nhân và hỗ trợ di chuyển. Có AMRs trong ngành bán lẻ, robot dịch vụ tại cửa hàng và nhà hàng, và các dịch vụ giao hàng cuối cùng tự trị để thực hiện đơn đặt hàng thông minh. Các ứng dụng khác bao gồm canh tác tự trị và thu hoạch thông minh, xây dựng, làm sạch công nghiệp và khắc phục thảm họa.
Việc phát triển và triển khai AMRs mất nhiều nỗ lực hơn có thể được hoàn thành bởi một công ty duy nhất. Phải mất một hệ sinh thái hợp tác với các đối tác hợp tác với các nhà cung cấp phần mềm và nền tảng phần cứng thời gian thực, nhà cung cấp tích hợp cảm biến và hệ thống và người dùng cuối ứng dụng. ADLINK hỗ trợ các nhà phát triển bằng cách tích hợp phần cứng và phần mềm với các công nghệ truyền thông để cho phép họ xây dựng và triển khai AMRs, nhanh chóng, linh hoạt và tiết kiệm chi phí hơn trong môi trường 5G riêng.
Nội dung và ý kiến trong bài viết này là của tác giả và không nhất thiết đại diện cho quan điểm của RoboticsTomorrow
Tác giả : Eddie Liu, Giám đốc sản phẩm của AMR | ADLINK