




Trên một loạt các bàn tay và kẹp robot, có một kẻ thù chung: cà chua gia truyền. Bạn có thể đã thấy một tay cầm rô-bốt khéo léo gắp một quả trứng hoặc cọ một quả bóng rổ một cách nhuần nhuyễn – nhưng, không giống như bàn tay của con người, một tay cầm khó có thể làm được cả hai và một thử thách quan trọng vẫn còn ẩn trong khu đất trung bình.
FarmHand trải qua một loạt các thao tác thể hiện khả năng hoạt động đa dạng của nó.
Wilson Ruotolo, Tiến sĩ ’21, một cựu sinh viên tốt nghiệp tại Phòng thí nghiệm Đo lường Sinh học và Thao tác bằng tay tại Stanford, cho biết: “Bạn sẽ thấy những bàn tay robot nắm bắt quyền lực và nắm bắt chính xác và sau đó ngụ ý rằng chúng có thể làm mọi thứ ở giữa. Trường đại học. “Điều chúng tôi muốn giải quyết là làm thế nào để tạo ra những người thao túng đồng thời khéo léo và mạnh mẽ.”
Kết quả của mục tiêu này là “farmHand”, một bàn tay rô bốt được phát triển bởi các kỹ sư Ruotolo và Dane Brouwer, một sinh viên tốt nghiệp tại Phòng thí nghiệm thao tác bằng tay và đo lường sinh học, tại Stanford (hay còn gọi là “Trang trại”) và được trình bày chi tiết trong một bài báo được xuất bản vào ngày 15 tháng 12 trong Khoa học Robot. Trong thử nghiệm của họ, các nhà nghiên cứu đã chứng minh rằng farmHand có khả năng xử lý nhiều loại mặt hàng, bao gồm trứng sống, chùm nho, đĩa, bình đựng chất lỏng, bóng rổ và thậm chí cả máy mài góc.
FarmHand được hưởng lợi từ hai loại cảm hứng sinh học. Trong khi các ngón tay có nhiều khớp gợi nhớ đến bàn tay người – mặc dù là bàn tay bốn ngón – các ngón tay được phủ một lớp chất kết dính lấy cảm hứng từ tắc kè. Vật liệu dẻo dai nhưng không dính này dựa trên cấu trúc của ngón chân tắc kè và đã được phát triển trong thập kỷ qua bởi Phòng thí nghiệm mô phỏng sinh học và thao tác bằng tay, dẫn đầu bởi Mark Cutkosky, Giáo sư Fletcher Jones tại Trường Kỹ thuật, đồng thời là tác giả cao cấp. của nghiên cứu này.
Lần đầu tiên sử dụng chất kết dính tắc kè trên một cái kẹp đa ngón, nhân hình là một thử thách, đòi hỏi sự chú ý đặc biệt đến các gân điều khiển các ngón tay của nông dân và thiết kế của các miếng đệm ngón tay bên dưới chất kết dính.
Từ trang trại đến vũ trụ và quay lại một lần nữa
Giống như ngón chân của tắc kè, chất kết dính tắc kè tạo ra một lực giữ chắc chắn thông qua các cánh siêu nhỏ. Khi tiếp xúc hoàn toàn với một bề mặt, các cánh này tạo ra lực Van der Waals – một lực liên phân tử yếu do sự khác biệt nhỏ về vị trí của các electron ở mặt ngoài của các phân tử. Do đó, chất kết dính có thể bám chặt nhưng cần ít lực thực tế để làm như vậy. Một điểm cộng khác: chúng không cảm thấy dính khi chạm vào hoặc để lại cặn.
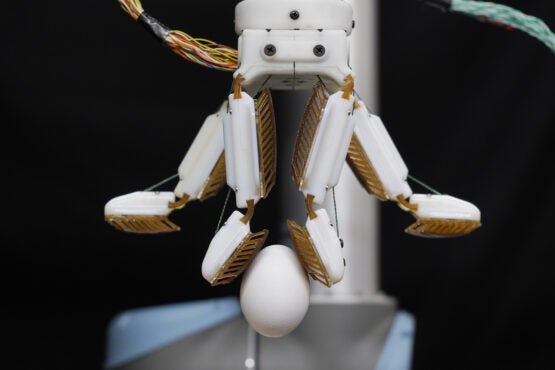
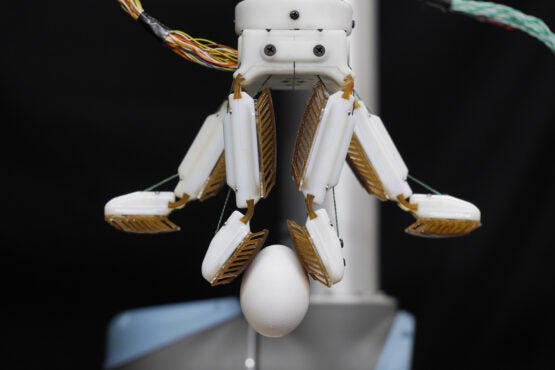
Cận cảnh bàn tay thực hiện động tác véo mạnh chỉ trên bề mặt trên của quả trứng. (Tín dụng hình ảnh: Phòng thí nghiệm đo lường sinh học và thao tác bằng tay)
“Những ứng dụng đầu tiên của chất kết dính tắc kè liên quan đến robot leo núi, leo người hoặc cầm nắm các vật thể rất lớn, rất trơn trong không gian. Nhưng chúng tôi luôn nghĩ đến việc sử dụng chúng cho các ứng dụng đơn giản hơn, ”Cutkosky nói. “Vấn đề là hóa ra chất kết dính tắc kè thực sự rất phức tạp.”
Điều phiền phức là chất kết dính tắc kè phải kết nối với bề mặt theo một cách cụ thể để kích hoạt lực Van der Waals. Điều này đủ dễ dàng để kiểm soát khi chúng được áp dụng trơn tru trên bề mặt phẳng, nhưng khó hơn nhiều khi việc cầm nắm dựa vào nhiều miếng keo dính tắc kè tiếp xúc với một vật thể ở nhiều góc độ khác nhau, chẳng hạn như với farmHand.
Véo và vênh
Bên dưới chất kết dính, miếng đệm ngón tay của farmHand giúp giải quyết thách thức này. Chúng được làm bằng cấu trúc sườn có thể gập lại được, chịu lực với lực nhỏ. Bất kể vị trí hoặc góc tiếp xúc, các đường gân luôn khóa chặt để đảm bảo lực tác động lên các miếng dính bằng nhau và ngăn chặn bất kỳ miếng dính nào bị trượt sớm.




Brouwer nói: “Nếu bạn di chuyển những chiếc xương sườn này, sự xô lệch sẽ tạo ra một lực tương tự cho dù bạn bắt đầu từ đâu. “Đó là một hành vi vật lý, đơn giản có thể được triển khai ngay cả trong các không gian bên ngoài robot, có thể là lốp giày hoặc lốp xe chạy mọi địa hình.”
Các gân của bàn tay cũng rất quan trọng bởi vì chúng có thể tạo ra một cú véo giả. Trong khi nhiều bàn tay robot và kẹp sẽ kẹp các vật thể theo hình chữ “C”, chẳng hạn như nhặt một vật gì đó chỉ bằng đầu ngón tay của bạn, thì farmHand sẽ kẹp chặt đầu ngón tay vào miếng đệm. Điều này mang lại cho chất kết dính nhiều diện tích bề mặt hơn để làm việc.
Để có được thiết kế phù hợp đặc biệt khó vì các mô phỏng máy tính hiện có gặp khó khăn trong việc dự đoán hiệu suất trong thế giới thực với các vật thể mềm – một yếu tố khác trong vấn đề cà chua gia truyền. Nhưng các nhà nghiên cứu được hưởng lợi rất nhiều từ việc có thể in 3D và kiểm tra nhiều thành phần nhựa cứng và mềm trong các chu kỳ tương đối nhanh. Họ đi xa đến mức gợi ý rằng thành công của họ có thể không thể xảy ra – hoặc ít nhất là chậm hơn nhiều – chỉ cách đây 5 năm.
Những cải tiến hơn nữa cho farmHand có thể đến dưới dạng các tính năng phản hồi giúp người dùng hiểu cách cầm nắm và cách tay cầm có thể cầm tốt hơn khi đang sử dụng. Các nhà nghiên cứu cũng đang xem xét các ứng dụng thương mại cho công việc của họ.
Nguồn : www.roboticstomorrow.com. (Post by Automation Bot)