











Bạn có thể thích




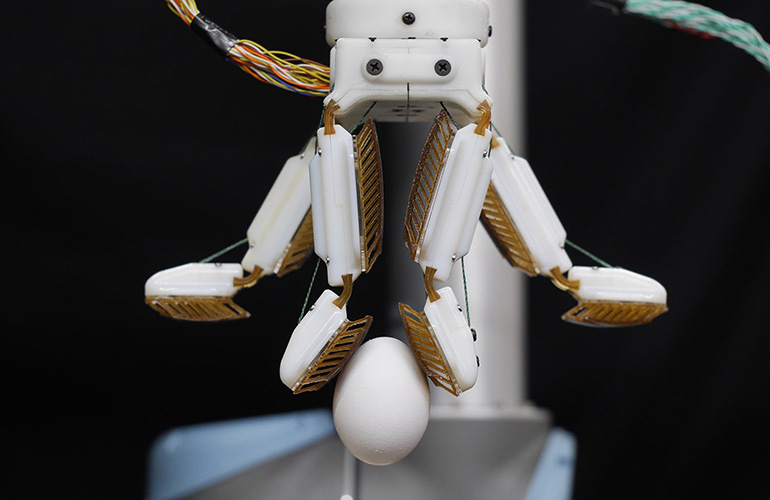
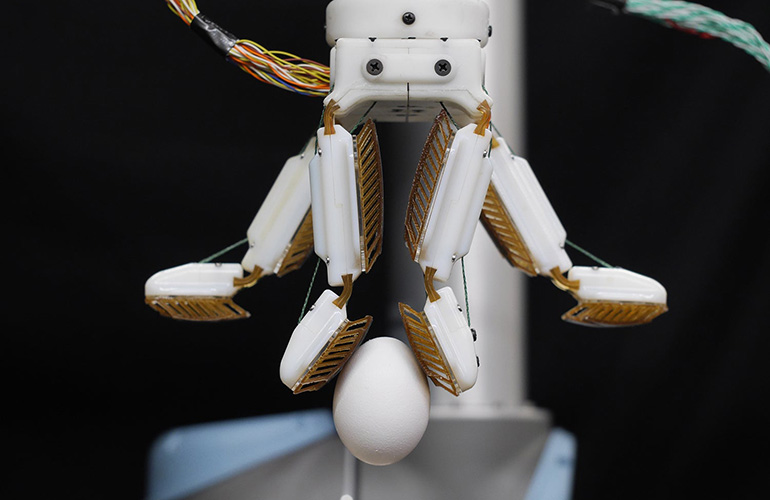
Chìa khóa để nắm được bàn tay robot này nằm ở đầu các ngón tay của nó. Miếng dán dính độc đáo của nó giúp nó có thể giữ chặt các đồ vật với một lực nhỏ. | Nguồn: Đại học Stanford
Các nhà nghiên cứu tại Stanford đã bắt tay vào chế tạo một bàn tay robot có thể làm được tất cả, từ nhặt những vật tinh vi như trứng sống và cà chua, cho đến xử lý những vật lớn như bóng rổ.
Wilson Ruotolo, Tiến sĩ ’21, một cựu sinh viên tốt nghiệp tại Phòng thí nghiệm Đo lường Sinh học và Thao tác bằng tay tại Stanford, cho biết: “Bạn sẽ thấy những bàn tay robot nắm bắt quyền lực và nắm bắt chính xác và sau đó ngụ ý rằng chúng có thể làm mọi thứ ở giữa. Trường đại học. “Điều chúng tôi muốn giải quyết là làm thế nào để tạo ra những người thao túng đồng thời khéo léo và mạnh mẽ.”
Ruotolo và Dane Brouwer, một sinh viên tốt nghiệp tại Phòng thí nghiệm Mô phỏng sinh học và Thao tác khéo léo tại Stanford, đã thực hiện một cách tiếp cận độc đáo để phát triển bàn tay robot của họ, farmHand.
FarmHand lấy cảm hứng từ sinh học. Đó là bốn ngón tay có nhiều khớp giống bàn tay người, nhưng các đầu ngón tay được bao phủ bởi chất kết dính lấy cảm hứng từ tắc kè. Các chất kết dính đã được phát triển trong thập kỷ trước tại Phòng thí nghiệm Mô phỏng sinh học và Thao tác khéo léo, do Mark Cutkosky đứng đầu.
Vật liệu kết dính được tạo thành không dính. Thay vào đó, chúng bám vào một vật thể bằng cách sử dụng các cánh siêu nhỏ tạo ra lực Van der Waals, tương tự như ngón chân của tắc kè. Lực Van der Waals là một lực liên phân tử yếu sinh ra từ sự khác biệt nhỏ về vị trí của các electron.
Keo dán tắc kè có thể bám chặt, ít lực và không gây cảm giác dính hay để lại cặn. Chúng dường như là câu trả lời hoàn hảo cho vấn đề và chúng đã được sử dụng trong các ứng dụng tương tự trước đây.
Vào năm 2019, OnRobot giải thoát một bộ tạo hiệu ứng cuối cho các cánh tay robot hợp tác được gọi là bộ kẹp Gecko. Máy kẹp này đã sử dụng hàng triệu thân sợi nhỏ có kích thước siêu nhỏ dính vào bằng lực Van der Waals. Vào năm 2020, công ty đã phát hành một phiên bản nhỏ hơn của bộ gắp.
“Những ứng dụng đầu tiên của chất kết dính tắc kè liên quan đến robot leo núi, leo người hoặc cầm nắm các vật thể rất lớn, rất trơn trong không gian. Nhưng chúng tôi luôn nghĩ đến việc sử dụng chúng cho các ứng dụng đơn giản hơn, ”Cutkosky nói. “Vấn đề là hóa ra chất kết dính tắc kè thực sự rất phức tạp.”

OnRobot’s Gecko Gripper sử dụng công nghệ tương tự
Bộ kẹp cần kết nối với một bề mặt theo một cách cụ thể để hoạt động. Ví dụ: các hiệu ứng cuối của OnRobot là phẳng và chỉ có thể nhận các vật thể phẳng, nhẵn. Các bộ kẹp là một sự thay thế thân thiện với môi trường hơn cho các bộ hiệu ứng cuối chân không.
Có ba nguyên tắc mà các nhà nghiên cứu tập trung vào để làm cho chất kết dính tắc kè trở nên hữu ích trong các ứng dụng hàng ngày: diện tích tiếp xúc cao, chia sẻ tải trọng cắt và phân bố đều ứng suất bình thường.
Các nhà nghiên cứu đã tìm thấy chìa khóa để làm cho chất kết dính hoạt động trong các miếng đệm ngón tay bên dưới chất kết dính. Các miếng đệm ngón tay được làm bằng cấu trúc xương sườn có thể thu gọn lại chịu lực nhỏ. Sự vênh đảm bảo rằng các lực kết dính bằng nhau.
Một khía cạnh quan trọng khác của bàn tay là các đường gân của nó. Nhiều bàn tay robot kẹp các vật thể theo hình chữ “C”, nhưng thay vào đó, farmHand sẽ kéo dài ra để tạo ra nhiều chuyển động véo hơn. Bằng cách này, farmHand nhặt các đồ vật bằng các ngón tay của nó được ép vào nhau.
Để kiểm tra farmHand, các nhà nghiên cứu đã in 3D các thành phần nhựa mềm và cứng. Thông thường, các nhà nghiên cứu sẽ sử dụng mô phỏng máy tính để thử nghiệm các thiết kế khác nhau, nhưng các nhà nghiên cứu phải sử dụng các phương tiện khác vì các chương trình máy tính hiện có không thể dự đoán hiệu suất trong thế giới thực với các vật thể mềm.
Để cải thiện hơn nữa farmHand, các nhà nghiên cứu đang khám phá các tính năng phản hồi có thể giúp họ hiểu cách bàn tay nắm chặt và cách nó có thể được cải thiện trong khi sử dụng. Họ cũng đang xem xét việc sử dụng thương mại cho farmHand.
Ghi chú của người biên tập: Toàn bộ nghiên cứu của các nhà nghiên cứu có thể được tìm thấy nơi đây.
Nguồn : www.therobotreport.com (Post by Automation Bot)
































